教員別研究内容
田窪 朋仁(教授)
多脚ロボット移動マニピュレータ
ヒューマノイドロボット
ウェアラブルパーソナルモビリティ
人間機械協調
上野 敦志(講師)
遺伝的アルゴリズム (GA)パターン認識 (Support Vector Machine)
強化学習 (Profit Sharing, Q-learning)
研究紹介
多脚ロボット
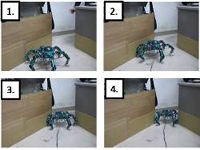
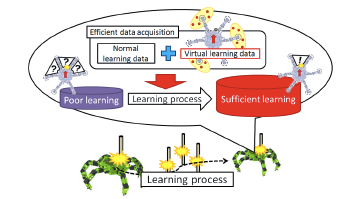
接触情報を用いた腕脚統合型ロボットによる障害物回避
本研究では腕脚統合型ロボット "ASTERISK" のセンサ情報を用いた障害物回避手法を提案し,狭隘部での移動を実現する.提案手法では,センサーフィードバックによる接触情報により,ワークスペースを保ちながら,衝突脚を障害物から回避するとともに, 衝突脚が好ましい動作領域を超えようとする際には,仮想インピーダンス壁を用いることで,胴体を障害物から回避させる.障害物との接触は関節のサーボエラー情報から機械学習を行うことで推定する.また,インピーダンスパラメータの決定には強化学習を用いて最適なパラメータを決定している.
移動マニピュレータ
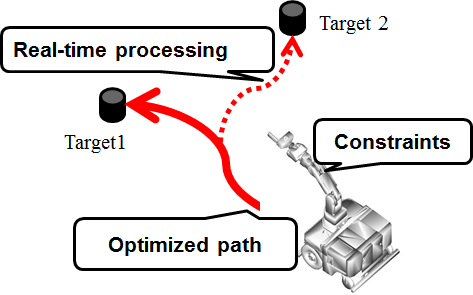
モデル予測制御を用いた多自由度ロボットの最適軌道生成
移動マニピュレータの高機動化に関する課題に対し,モデル予測制御を用いた制御により複数制約下で最適軌道生成を行う手法を提案している.移動マニピュレータは,移動機能とマニピュレータによる作業機能の協調は大きなテーマとなっており,移動機能には台座の位置や不安定な状況下での移動,作業機能には作業時の安定性の維持及び外力に対する対応が必要となる.この 2 つの問題に対してハードウェアの制約内で対応する軌道計画が求められる.移動マニピュレータの入出力制約条件を満たした最適性を有する軌道生成を行う手法として,制約条件付き 2 次計画問題に基づくモデル予測制御を平面 2 自由度移動マニピュレータの動力学モデルに導入し,モデルの入出力の制約条件を満たした最適軌道の生成が可能であることを確認した.
ヒューマノイドロボット
差分方程式拘束を伴う離散時間非ホロノミック系を用いた2足歩行計画
ヒューマノイドロボットの歩行計画を行う手法を提案している.提案手法では,2 足歩行モデルとして線分のピボット操作と線分の長さを修正する操作を繰り返す非ホロノミックモデルを導入し,差分方程式拘束を伴う離散時間非ホロノミック系の運動計画により幾何学的に歩行計画を行う.

ウェアラブルパーソナルモビリティ
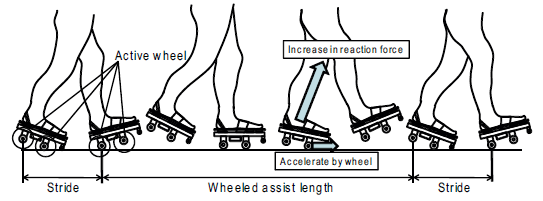
軽度の身体機能低下により歩行を苦手とする人を対象に,「簡易・小型構成の履物型の移動支援装置」を提案する.提案する装置は,靴などの履物の接地部分へ駆動輪を装着し,歩行中に安定性が十分大きいとき,取り付けられたセンサ情報を基に駆動輪の走行アシスト率を判断し,利用者の移動速度を向上させる装置である.人の歩行状態をシミュレーションとセンサ情報から解析することで移動支援装置に装着されているセンサから人の加速や減速の意図を推定し,その情報に基づいて駆動輪の加減速を制御するシステムを提案する.
人間機械協調
行動と状況変化の履歴に基づく人の操作推定
人間は変化する状況と自らの操作履歴に基づき次の操作を変化させると考えられる.操作入力と空間情報の時系列情報を隠れマルコフモデルにより学習させることで人間の操作を推定するシステムを提案する.
複数モジュールによる人の入力特性の獲得
人間の入力履歴から人の入力特性を獲得することを目的とする.状況に応じた学習器を複数配置し,個々の学習器の学習は入力特性の責任信号の切り替えで行うことで人の操作特性に近いシステムが獲得される.